
研究基础
本项目依托单位教育部深空探测联合中心在深空巡视探测领域具有雄厚的研究基础和丰富的技术积累,已形成了一套较为完善的跨校、跨部门科研组织管理架构。长期从事载人月球车的基础理论研究,先后承担了包括总装备部、航天集团在内的国家级项目30余项,并成功举办了全国性的“月球车概念设计大赛”。与中国空间技术研究院、上海宇航研究所等企业在星面巡视器、空间机构设计及可靠性等方面做了大量研究并积累了丰富的实践经验。先后完成了XX月球车样机、月球车、火星车等星际巡视器的研制工作,其中,中心组织成员单位与航天集团共同研制的“四轮三轴”月球车方案,成为国家探月二期的备选方案。在研制过程中积累了较好的航天项目研究经验,建立了完善的项目研究和质量保证体系,这些都将为本项目的开展提供有力支撑。
项目研究团队长期从事空间机构设计及分析、星表探测机器人研制、有效载荷总体设计等方面的工作,与航天八院805所“玉兔号”月面巡视器移动系统研制团队建立了密切的合作关系。先后承担多项国家科研项目,如装备预研教育部支撑技术项目“高机动性XXX传动机构关键技术研究”、民用航天预先研究项目“机器人移动机构构型运动学与动力学分析”、总装备部XX航天领域预先研究项目“机器人移动系统论证及分析”和“XXXXX概念与总体技术研究”、重庆市特种车辆项目等,完成了“可重构、可折叠XX月球车”、“六轮腿机器人”及“蜘蛛型机器人”等试验样机的研制及测试。相关研究成果已申请国家专利5项,在国内外期刊发表论文10余篇。
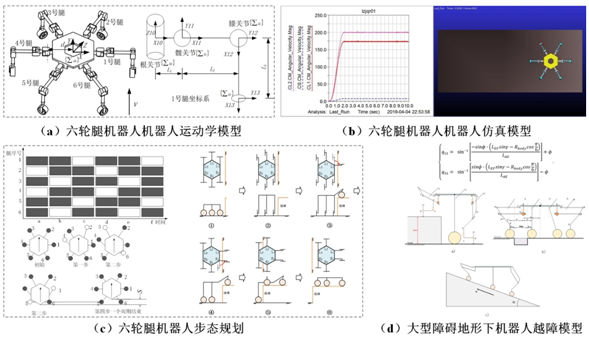
图 1 部分轮腿机器人研究成果
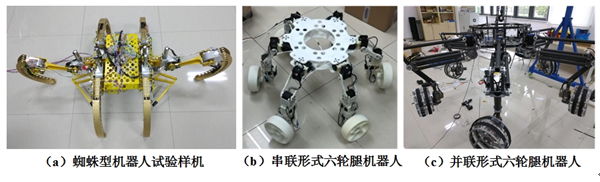
图 2 部分研制成果
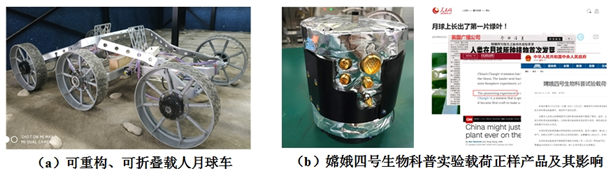
图 3 部分研制成果
项目团队在星表机器人、航天器有效载荷、空间机构与结构、空间环境等方面有着深入研究,取得多项突出成果,如承担了嫦娥四号生物科普实验载荷研制任务,获得圆满成功,在月球表面培养出第一片绿叶;与航天八院共同研制了“四轮三轴”月球车、端抱式转移机构成为国家探月二期的备选方案;研制了嫦娥五号姿态模拟实验平台,为嫦娥五号月表采样模拟试验提供保障,等。在研制过程中积累了较好的航天项目研究经验,建立了完善的项目研究和质量保证体系。此外,联合中心拥有1000m2的月面典型环境试验场地,为本项目地形匹配试验提供场地保障。同时,联合中心还将在人力、物力和财力上给予支持,并协助搞好外协关系,为项目顺利实施提供保障。

图 4 试验场地及典型地形